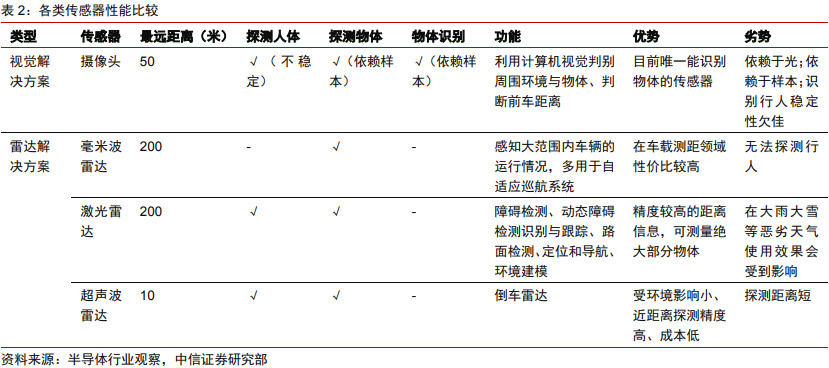
自動駕駛的環境監測感測器主要包括鏡頭和雷達兩類; 鏡頭通過圖像識別技術實現距離測量, 目標識別等功能. 雷達利用發射波和反射波之間的時間差, 相位差獲得目標物體的位置和速度等數據, 按所使用的不同類型的波, 雷達可以分為毫米波雷達, 光達, 超音波雷達三類.
目前自動駕駛市場上存在著兩種不同路徑; 一種是由鏡頭主導, 配合毫米波雷達等低成本元件組成, 構成純視覺計算, 典型代表為特斯拉, Mobileye.另一種是由光達主導, 配合鏡頭, 毫米波雷達等元件組成, 典型代表為谷歌 Waymo. (與未來的 Apple car?)
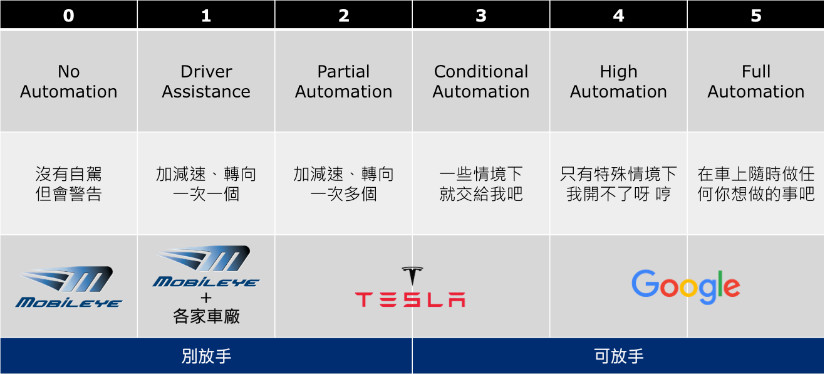
對岸理想汽車 CEO 曾說過: "目前鏡頭+毫米波雷達的組合 (如 Tesla) 像青蛙的眼睛, 對於動態物體判斷還好, 對於非標準的靜態物體幾乎無能!". 而在能見度和識別 3D 物體的問題則是光達擅長的. (下圖左一為今年在台灣國道一號發生的車禍, Tesla 筆直的撞向橫躺車道上的小貨車)

光達是一種向被測目標發射探測信號, 然後測量反射或散射信號的到達時間, 強弱程度等參數, 以確定目標的距離, 方位, 運動狀態及表面光學特徵的雷達系統. 光達主要包括雷射發射, 掃描系統, 雷射接收和信息處理四大系統.
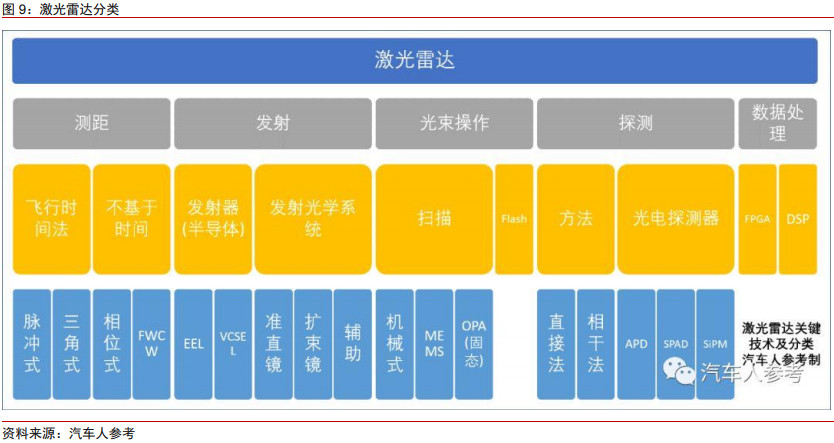
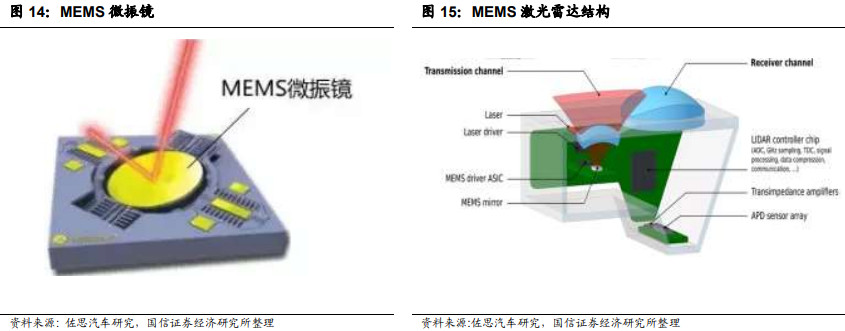
光達的掃描技術直接關係到 3D 空間模型的搭建, 可以分為掃描式和 Flash 面陣式兩種. 掃描式光達具體有三種技術路徑可以實現; 機械式, MEMS, 固態掃描. 目前 MEMS 和 Flash 技術越來越受到光達廠商的重視, 有望逐步取代傳統的機械式光達.

MEMS 光達與機械光達相比有機械結構簡化, 成本降低, 分辨率高等三大優勢. MEMS 微振鏡可以精確控制光線角度, 而機械激光達僅可以調整馬達轉速. 同時MEMS 光達由於只採用一組雷射發射和接收裝置, 雷射功率較低, 也存在著信噪比較低, 有效距離較短和視野較窄的問題.
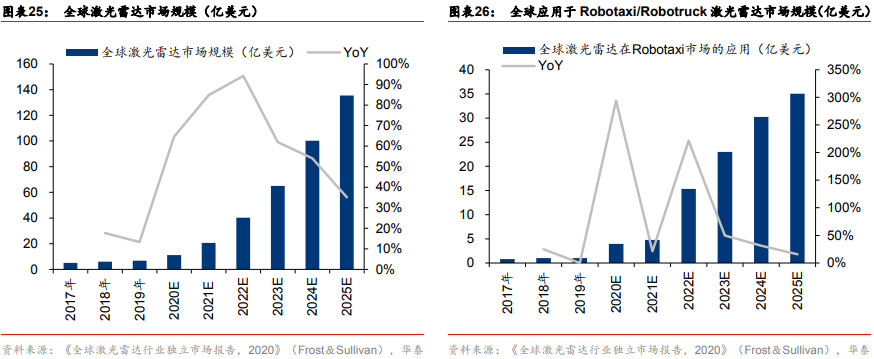
未來受益於 Robotaxi/Robotruck 車隊規模擴張, 固態激光雷達在 ADAS 中的廣泛應用以及智慧交通建設等領域需求的推動, 整體市場預計將呈現出快速發展的趨勢. 根據沙利文預測到 2020~2025 年複合增速為 64.65%.
光達核心技術主要掌握在 Velodyne, Quanergy, Ibeo 三家國外企業中. 美國 Velodyne 機械式光達起步較早. Quanergy 開始走固態路線, 採用了 OPA 光學相控陣技術. Ibeo 是全球第一個擁有車規級光達的企業, 2017 年推出了全固態光達樣機.